 English
English
 русский
русский
 Español
Español
 عربى
عربى

Noticias
 Hogar / Noticias / Noticias de la industria / ¿Cómo se elige el mecanismo de giro horizontal adecuado para su aplicación?
Hogar / Noticias / Noticias de la industria / ¿Cómo se elige el mecanismo de giro horizontal adecuado para su aplicación? ¿Cómo se elige el mecanismo de giro horizontal adecuado para su aplicación?
 2026.05.13
2026.05.13
 Noticias de la industria
Noticias de la industria
Seleccionar el mecanismo de giro horizontal correcto es una de esas decisiones que parece sencilla en la superficie pero que rápidamente revela capas de complejidad cuando se profundiza en los requisitos de la aplicación. Una mala selección no sólo tiene un rendimiento inferior: falla prematuramente, crea cargas de mantenimiento y, en sistemas críticos para la seguridad, puede causar costosos tiempos de inactividad o accidentes. Esta guía recorre cada variable de selección significativa, brindando a los ingenieros y especialistas en adquisiciones un marco práctico para tomar la decisión correcta la primera vez.
Contenido
- 1 Lo que realmente hace una unidad de giro horizontal
- 2 Análisis de carga: el punto de partida no negociable
- 3 Requisitos de par y tamaño del motor
- 4 Parámetros de selección clave comparados
- 5 Consideraciones ambientales y de ciclo de trabajo
- 6 Configuración de montaje y geometría de interfaz
- 7 Factores de seguridad y expectativas de vida útil
- 8 Lista de verificación práctica antes de finalizar su selección
Lo que realmente hace una unidad de giro horizontal
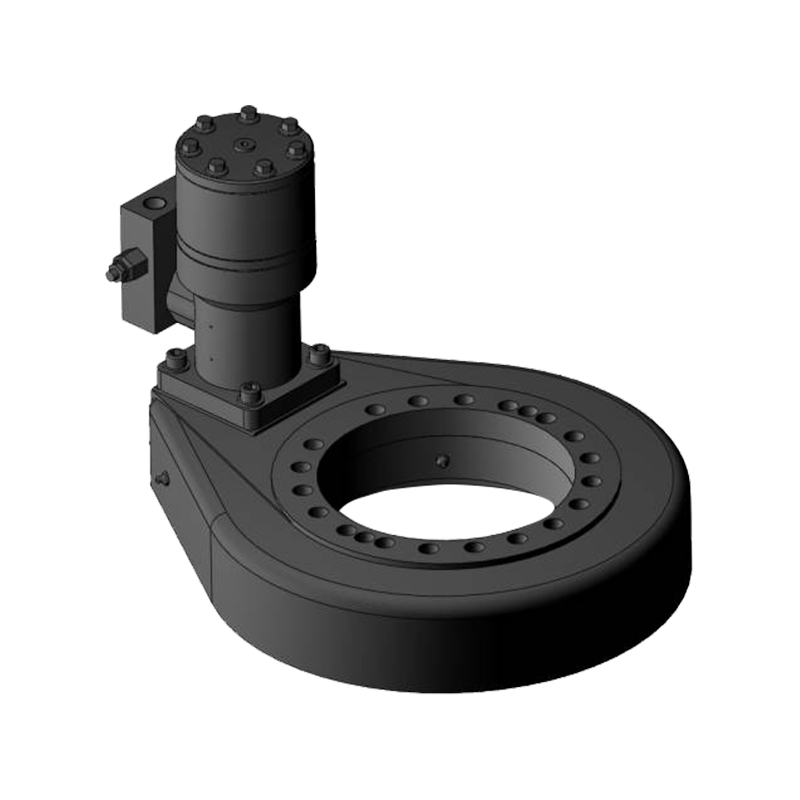
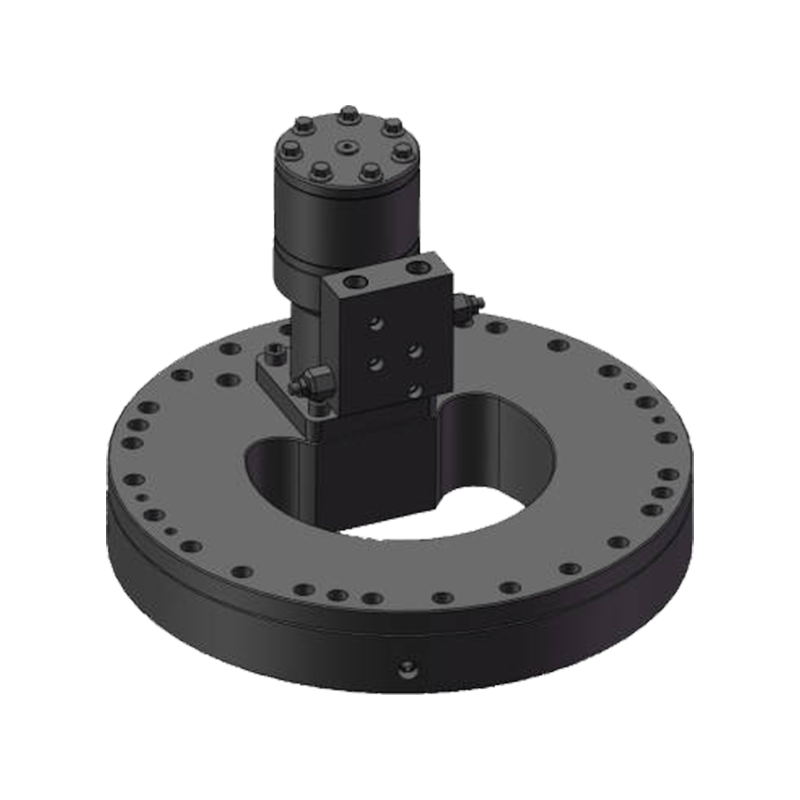
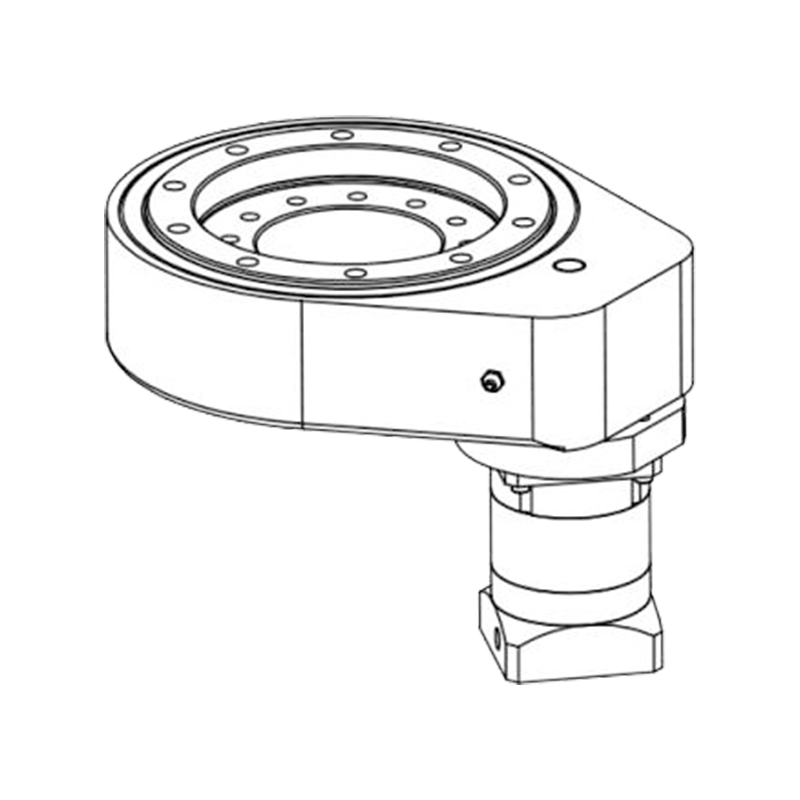
Un mecanismo de giro horizontal es un actuador giratorio completamente cerrado que combina un mecanismo de reducción de engranaje helicoidal con un cojinete de anillo giratorio en una sola carcasa integrada. El anillo giratorio maneja las cargas radiales, axiales y de momento impuestas por la estructura giratoria superior, mientras que el engranaje helicoidal proporciona la ventaja mecánica necesaria para impulsar esa rotación con una entrada de motor relativamente pequeña. "Horizontal" se refiere a la orientación del eje de salida del variador: la rotación se produce alrededor de un eje vertical, lo que la convierte en la opción natural para aplicaciones en las que una estructura debe oscilar, girar o girar continuamente en el plano horizontal.
A diferencia de los anillos giratorios independientes combinados con cajas de engranajes externas, un mecanismo de giro horizontal integrado simplifica la instalación, mejora la integridad del sellado y reduce el esfuerzo de ingeniería necesario para diseñar la estructura circundante. Esta integración es precisamente la razón por la que dominan aplicaciones como seguidores solares, plataformas giratorias para grúas, plataformas de trabajo aéreas, sistemas de orientación de turbinas eólicas y posicionadores de antenas satelitales, en cualquier lugar donde se requiera un accionamiento giratorio compacto y autónomo con una alta capacidad de carga.
Análisis de carga: el punto de partida no negociable
Cada selección de accionamiento de giro horizontal comienza con un análisis de carga completo. Saltarse o aproximarse a este paso es la fuente más común de falla prematura. Hay tres categorías de carga que el variador debe manejar simultáneamente y las tres deben cuantificarse antes de comenzar cualquier comparación de catálogos.
Carga axial
La carga axial actúa paralela al eje de salida del accionamiento; en un accionamiento de giro horizontal, este suele ser el peso muerto de la estructura giratoria de arriba. Un conjunto de paneles solares, una superestructura de plataforma giratoria de grúa o un conjunto de antena imponen su peso hacia abajo a través del accionamiento. Esta es la carga más sencilla de calcular: es esencialmente la masa total de todo lo que gira sobre el propulsor, multiplicada por la aceleración gravitacional y expresada en kilonewtons.
Carga radial
La carga radial actúa perpendicular al eje de salida, horizontalmente en el caso de un mecanismo de giro horizontal. La presión del viento sobre un panel o antena grande es la fuente más común de carga radial en aplicaciones al aire libre. La carga excéntrica causada por un centro de gravedad descentrado en el conjunto giratorio también contribuye con un componente radial. Las cargas radiales suelen ser dinámicas y direccionalmente variables, lo que hace que la estimación del valor máximo sea más crítica que el cálculo del valor promedio.
Momento de vuelco
El momento de vuelco es la carga de flexión que intenta inclinar la estructura giratoria con respecto a la carcasa del accionamiento. Se genera siempre que el centro de gravedad del conjunto giratorio no está directamente encima de la línea central de rotación de la transmisión, o cuando fuerzas horizontales (como el viento) actúan a una altura por encima del plano de montaje de la transmisión. El momento de vuelco se expresa en kilonewton-metros y frecuentemente es el parámetro de carga más exigente; muchas unidades que pasan verificaciones de carga axial y radial fallan en la capacidad de momento de vuelco.
Requisitos de par y tamaño del motor
Una vez establecidas las cargas, se debe calcular el par de salida requerido. Este es el par necesario en el anillo de salida del variador para superar todas las fuerzas resistivas y acelerar la carga a la velocidad de rotación requerida en un tiempo aceptable. Los principales contribuyentes al par requerido son la fricción dentro del cojinete de la corona de giro (que aumenta con la carga axial y el momento de vuelco), la resistencia aerodinámica sobre la estructura giratoria y el par de inercia necesario durante las fases de aceleración.
Unidades de giro horizontales se especifican por su par de retención nominal y su par de trabajo nominal; no son la misma cifra. El par de retención es la carga estática máxima que el variador puede soportar sin rotación; El par de trabajo es el par continuo disponible durante el funcionamiento. La característica de autobloqueo del engranaje helicoidal (presente cuando el ángulo de avance está por debajo del ángulo de fricción, generalmente cuando la relación de transmisión excede aproximadamente 20:1) significa que muchas unidades de giro horizontales pueden mantener su posición bajo carga sin un freno separado, una característica que simplifica el diseño del sistema en aplicaciones como seguidores solares donde la unidad debe mantener un ángulo de panel contra la carga del viento sin una activación continua del motor.
La selección del motor se deriva del par de entrada requerido (par de salida dividido por la relación de transmisión, ajustado para la eficiencia de la transmisión) y la velocidad de entrada requerida (velocidad rotacional de salida multiplicada por la relación de transmisión). La mayoría de los accionamientos de giro horizontales aceptan motores con estructura estándar IEC o NEMA, y muchos se suministran listos para el motor con una brida de montaje del motor mecanizada.
Parámetros de selección clave comparados
| Parámetro | Qué determinar | Rango común | Riesgo de selección si no se especifica lo suficiente |
| Carga axial Capacity | Masa giratoria total × gravedad | 5 kN – 2.000 kN | Deformación de la pista del rodamiento, agarrotamiento |
| Momento de vuelco | Carga excéntrica × brazo de momento | 0,5 kNm – 500 kNm | Fallo en el diente de la corona, inclinación |
| Par de trabajo | Par de inercia de arrastre de fricción | 0,5 kNm – 200 kNm | Sobrecarga del motor, desgaste del engranaje helicoidal |
| Velocidad de salida | Velocidad de giro requerida (°/min o rpm) | 0,01 – 10 rpm | Error de posicionamiento, exceso térmico |
| Relación de engranajes | Necesidad de autobloqueo versus eficiencia | 20:1 – 100:1 | Conducción hacia atrás, requisito de freno |
Consideraciones ambientales y de ciclo de trabajo
Una unidad que cumple con los requisitos de carga mecánica sobre el papel aún puede fallar prematuramente si la especificación ambiental es incorrecta. Los accionamientos de giro horizontales se utilizan ampliamente en exteriores, a menudo en condiciones difíciles, y la carcasa, el sellado y el tratamiento de la superficie deben adaptarse al entorno operativo.
- Clasificación IP: Para aplicaciones en exteriores, generalmente se requiere un mínimo de IP65 para excluir polvo y chorros de agua. Los entornos marinos o costeros exigen IP67 o superior, con sujetadores de acero inoxidable y protección adicional contra la corrosión en las superficies expuestas. Confirme que la clasificación IP se aplica al variador completamente ensamblado, incluida la interfaz del motor; algunos variadores tienen clasificación IP65 en la carcasa, pero tienen caras de montaje del motor sin protección que se convierten en puntos de ingreso.
- Rango de temperatura: Los lubricantes estándar funcionan bien entre −20 °C y 80 °C. Las aplicaciones en entornos árticos, instalaciones en el desierto o cerca de fuentes de calor industriales requieren grasas específicas para bajas o altas temperaturas. Confirme la especificación del lubricante del fabricante de la unidad y el rango de temperatura que cubre antes de finalizar la selección para implementaciones en climas extremos.
- Ciclo de trabajo: Unidades de giro horizontales in solar tracking applications typically operate intermittently — a brief movement every few minutes — placing low thermal demands on the worm gear assembly. Drives used in continuous-rotation applications such as antenna positioners or turntables face much higher thermal loads and require duty cycle ratings (expressed as operating time percentage) that match the application. Exceeding the duty cycle rating leads to lubricant degradation and accelerated worm gear wear.
- Protección contra la corrosión: Las transmisiones estándar utilizan carcasas de acero pintadas y imprimadas con fosfato de zinc adecuadas para entornos interiores. Las instalaciones costeras y marinas requieren carcasas galvanizadas en caliente, anillos de salida de acero inoxidable o superficies recubiertas de epoxi, según la categoría de corrosividad del sitio.
Configuración de montaje y geometría de interfaz
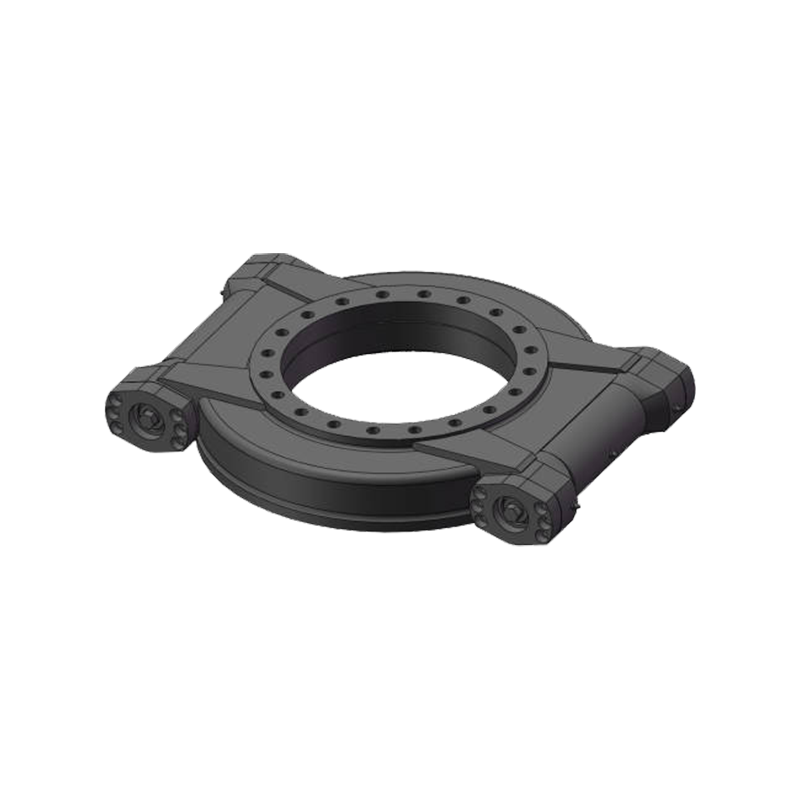
La integración física del mecanismo de giro en la estructura circundante es una limitación práctica que debe resolverse durante la selección, no durante la instalación. Los accionamientos de giro horizontales están disponibles con diferentes configuraciones de anillo de salida: engranaje externo (dientes en el exterior del anillo de salida), engranaje interno (dientes en el interior) y sin dientes (impulsado por fricción o conexión directa), cada uno de ellos adecuado para diferentes disposiciones cinemáticas. Los anillos de salida de engranajes externos son los más comunes y permiten que el eje helicoidal se coloque fuera del diámetro del anillo, manteniendo el motor y la caja de cambios accesibles para mantenimiento. Las configuraciones de engranajes internos se utilizan cuando la unidad debe integrarse en un conjunto giratorio compacto.
Las dimensiones del círculo de pernos tanto en la carcasa fija como en el anillo de salida giratorio se deben verificar con la estructura de acoplamiento. Muchos fabricantes ofrecen patrones de pernos, bridas de montaje e interfaces de eje de salida personalizados como opciones estándar; especificarlos en la etapa de pedido es mucho menos costoso que mecanizar adaptadores en el campo. Verifique también el diámetro del orificio pasante si los cables, líneas hidráulicas o mangueras neumáticas deben pasar a través del centro de la unidad; no todos los accionamientos de giro horizontales ofrecen un orificio central y no es posible actualizar esta característica.

Factores de seguridad y expectativas de vida útil
Las clasificaciones de carga publicadas para unidades de giro horizontales generalmente se basan en cálculos de carga de prueba estática o vida de fatiga dinámica, y aplicar un factor de seguridad apropiado por encima de la carga operativa calculada es una práctica de ingeniería estándar. Para la mayoría de las aplicaciones que no son críticas para la seguridad, es apropiado un factor de seguridad de 1,5× a 2× en el par de trabajo y la capacidad de carga. Para aplicaciones en las que la falla de la transmisión representa un riesgo para el personal (plataformas de trabajo aéreas, equipos de posicionamiento médico o grúas montadas en vehículos), se pueden especificar factores de seguridad de 3× o más, y se debe confirmar con el fabricante de la transmisión la certificación de terceros según las normas de seguridad de maquinaria relevantes (como EN 13000 para grúas o ISO 11684 para equipos agrícolas).
La vida útil esperada debe analizarse en términos de vida útil del rodamiento L10 (el número de horas de funcionamiento en las que se esperaría que el 10% de una población de transmisiones idénticas mostrara falla por fatiga del rodamiento) y vida útil a la fatiga de la superficie del engranaje helicoidal. Para aplicaciones de seguimiento solar, la norma de la industria es una vida útil de diseño de 25 años; Confirme que el cálculo de vida L10 del fabricante se basa en el perfil de carga operativa real de la aplicación, no en una condición de referencia genérica.
Lista de verificación práctica antes de finalizar su selección
- Confirme la carga axial, la carga radial máxima y el momento de vuelco máximo en las peores condiciones (normalmente velocidad máxima del viento combinada con carga excéntrica máxima)
- Verifique que el par de trabajo nominal del variador seleccionado exceda el par de salida requerido calculado por el factor de seguridad elegido
- Verifique la relación de transmisión para autobloqueo si se requiere retención de posición pasiva, o confirme la especificación del freno si no es así.
- Confirme que la clasificación IP, el rango de temperatura y la protección contra la corrosión coincidan con el entorno de instalación
- Verifique las dimensiones del círculo de pernos, la configuración del anillo de salida y los requisitos del orificio central con respecto al diseño de la estructura de acoplamiento
- Solicite un cálculo de la vida útil del rodamiento L10 basado en el perfil de carga de la aplicación real, no en las condiciones de referencia del catálogo.
- Confirme la compatibilidad de la interfaz del motor: tamaño de bastidor, diámetro del eje y estándar de brida de montaje (IEC o NEMA)
- Revisar las especificaciones de lubricación y el intervalo de reengrase con respecto al programa de mantenimiento planificado.
La selección de Corona de Orientación horizontal premia el análisis metódico. Las unidades en sí son componentes robustos y bien probados: las fallas que ocurren en el campo casi siempre se pueden atribuir a un parámetro de carga no especificado, una clasificación ambiental no coincidente o una restricción de interfaz que se pasa por alto. Trabaje sistemáticamente con cada una de las variables anteriores, contrate el soporte de ingeniería del fabricante cuando las condiciones de la aplicación sean inusuales y el resultado será un variador que funcionará de manera confiable durante toda la vida útil prevista del sistema que alimenta.

Jiangsu Manchen Transmission Technology Co., Ltd. se destaca en la creación de rodamientos giratorios personalizados, confiables y precisos para diversas industrias, innovando continuamente para cumplir con los más altos estándares y buscando oportunidades de colaboración.
Enlaces rápidos
Enlaces de productos
Contáctenos
-
Dirección: No. 8, Calle Nanqiu, Pueblo de Huangtu, Ciudad de Jiangyin, China
-
Teléfono:+86-13646122221
-
Teléfono:+86-18796936198
-
WhatsApp:+86 18796936198
-
Correo Electrónico:hedy@slewingbearingcn.com
-
Correo Electrónico:ma@slewingbearingcn.com
-
Correo Electrónico:vena@slewingbearingcn.com
Derechos de autor © Jiangsu Manchen Transmission Technology Co., Ltd. Fabricante de cojinetes de giro OEM
